3D Balance Foot
Here is the procedure to capture the 3D balance foot impression:
Install the sensor mat on the Ergomedic Calibrated Foam. Only this foam cushion is calibrated with your system. Position the indicator line of your sheet by following a column of the sensor mat. Position the food on the sensor mat so that you can align the posterior centre of the heel with the space between the 2nd and 3rd metatarsal heads.
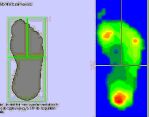
When the first impression of the foot is done, a milling frame will show up to verify the positioning and isolate only that area for pressure measurement. Keep a space of one line of the sensors under the heel and centre according to the medio-lateral arch.
Identify the central point of your imprint. This point is located at the half-length of the internal arch and the space between the 2nd and 3rd metatarsal heads. The software will give an approximation automatically for the position of the central point. Verify is well placed and reposition it as necessary.
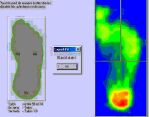
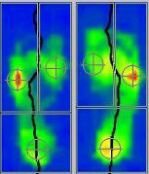
Redistribute and balance the pressure on the foot by observing the + or - arrows on the side by the boxes marked, Heel Region, 1st Metatarsal Region and 5th Metatarsal Region. To prevent that there be a deformation of the foot when taking the measurement, start by adjusting the pressure at the heel (see Heel Region) to get an average of between 41 et 72 mmHg. Once this pressure is reach, concentrate on the forefoot, 5th Metatarsal Region, to obtain the same average that you have in the Heel Region. The calculation shall be complete when the average pressures obtained in each zone will have the desired percentage. That is to say, 35% in the Heel Region, 35% in the 5th Metatarsal Region and 30% in the 1st Metatarsal Region for a total of 100%.
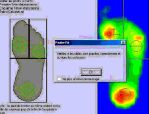
Place the three targets so as to position them on the anatomic apexes of the three bone references. Do not be influenced by the position of the maximum sensors of the imprint. The software will place the targets approximately, do not forget to verify theses positions and to correct them as needed.
Next
|
 |
|
|
| |
|